1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
|
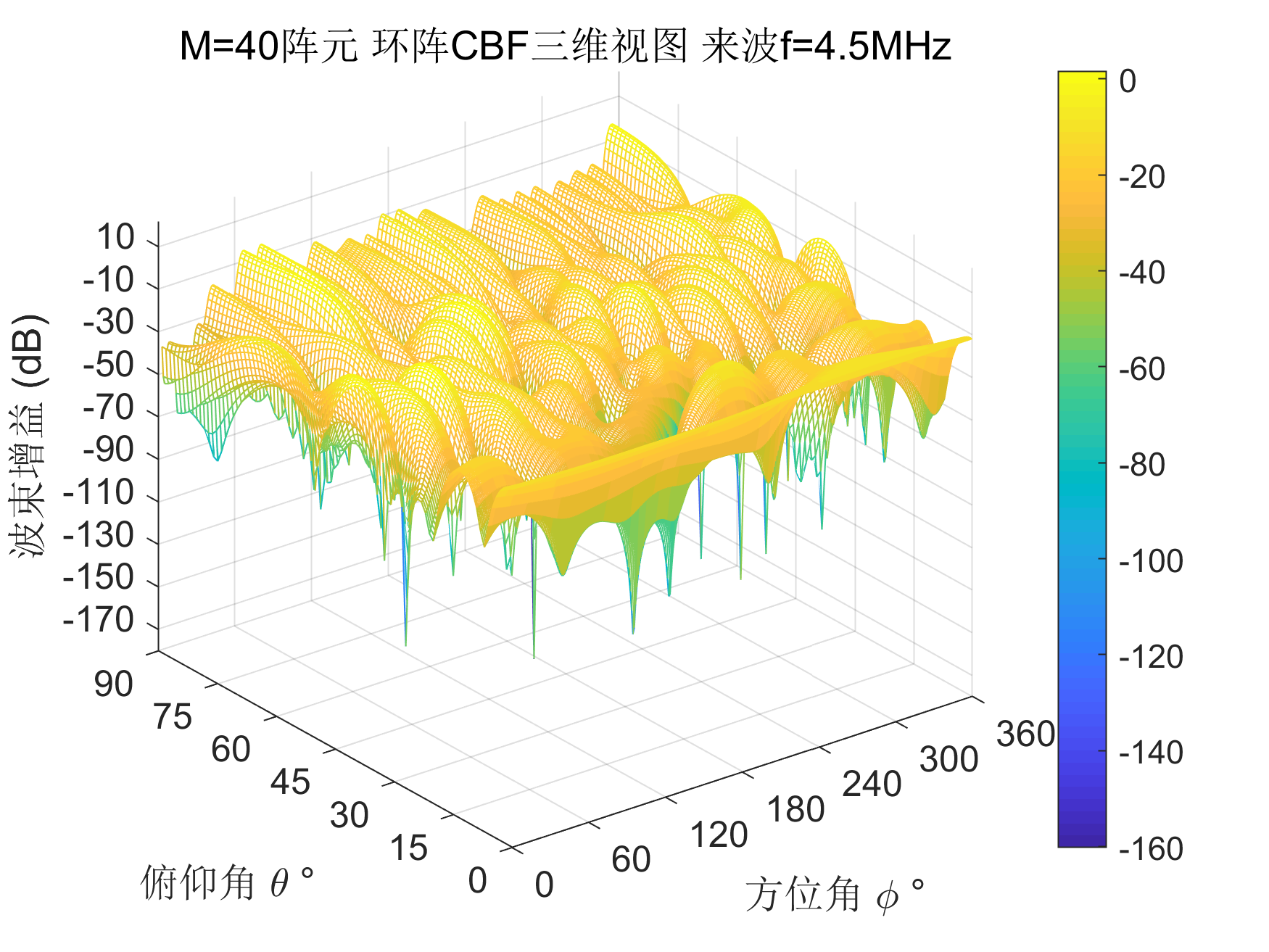
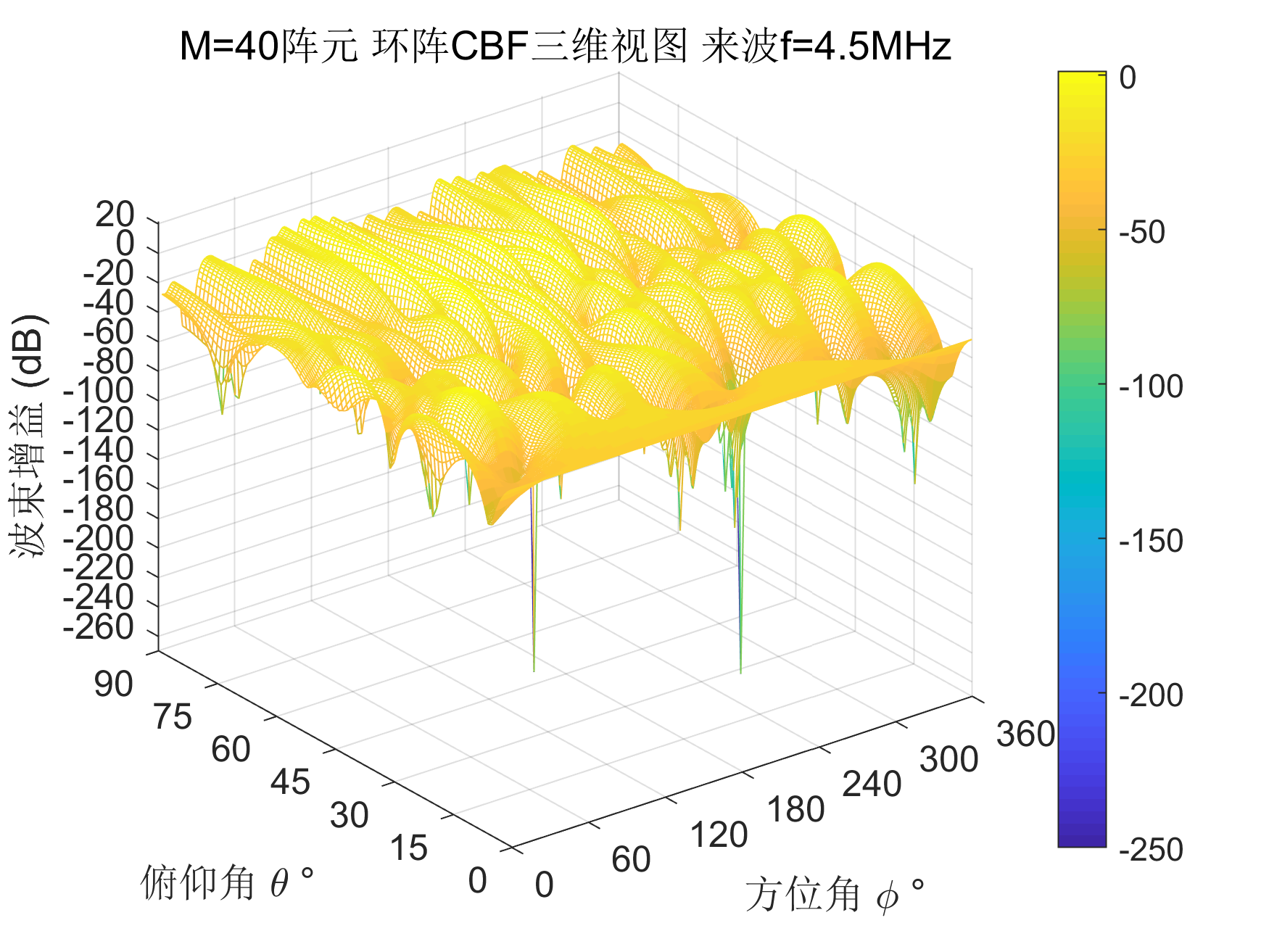
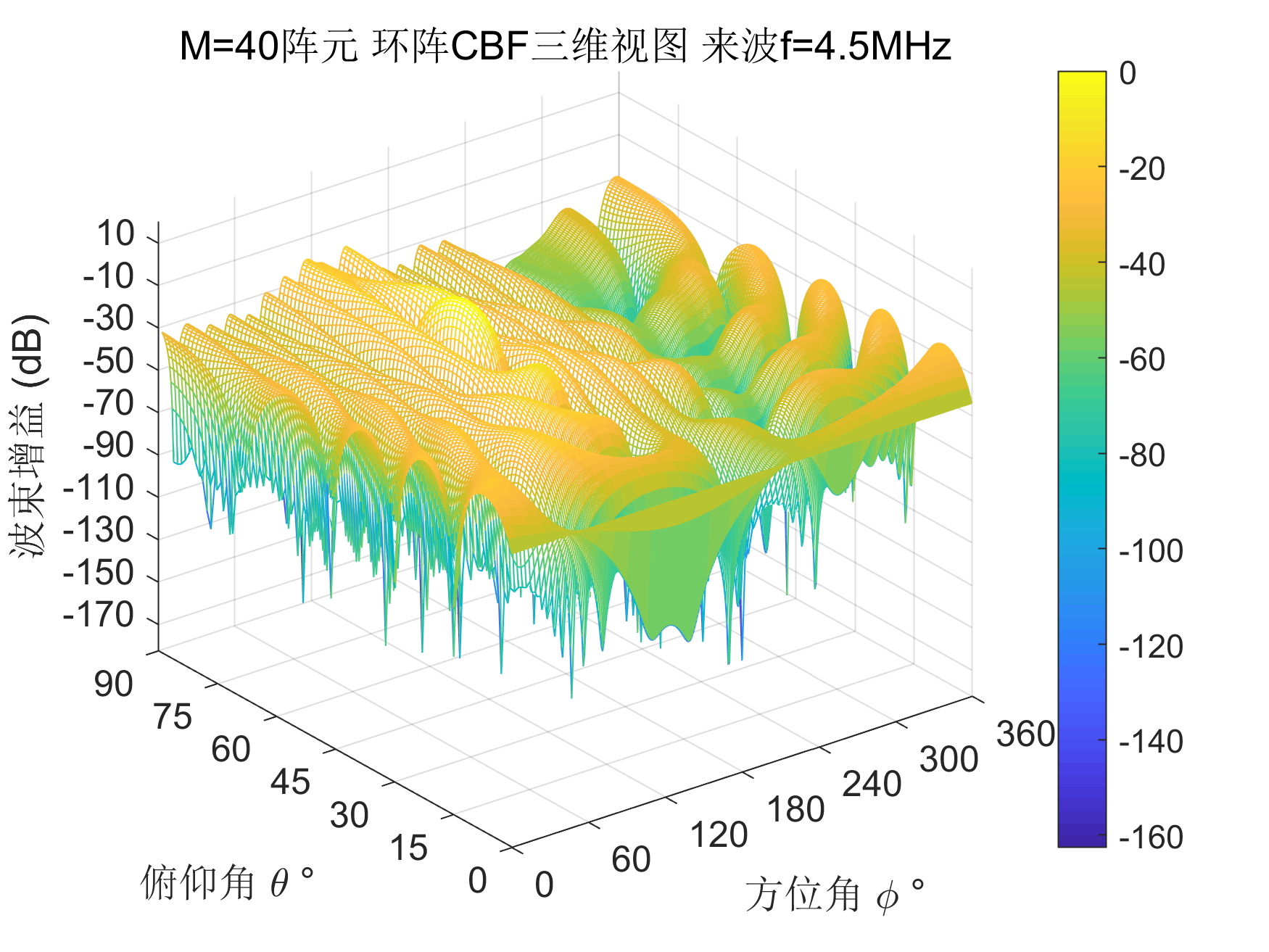
figure(1)
mesh(phi_scan*180/pi,theta_scan*180/pi,F_abs)
colorbar;
xlabel('方位角 \phi °');
ylabel('俯仰角 \theta ° ');
zlabel('波束增益 (dB)');
title(['M=',num2str(M),'阵元 环阵CBF三维视图 来波f=',num2str(f/1e6),'MHz']);
set(gca,'fontsize',12);
axis([0 360 0 90 min(min(F_abs))-20 max(max(F_abs))+20])
set(gca,'XTick',0:60:360);
set(gca,'YTick',0:15:90);
set(gca,'ZTick',(round(min(min(F_abs))/10)*10-10):20:20);
expect_n=1;
noise_n=2;
noise_nn=3;
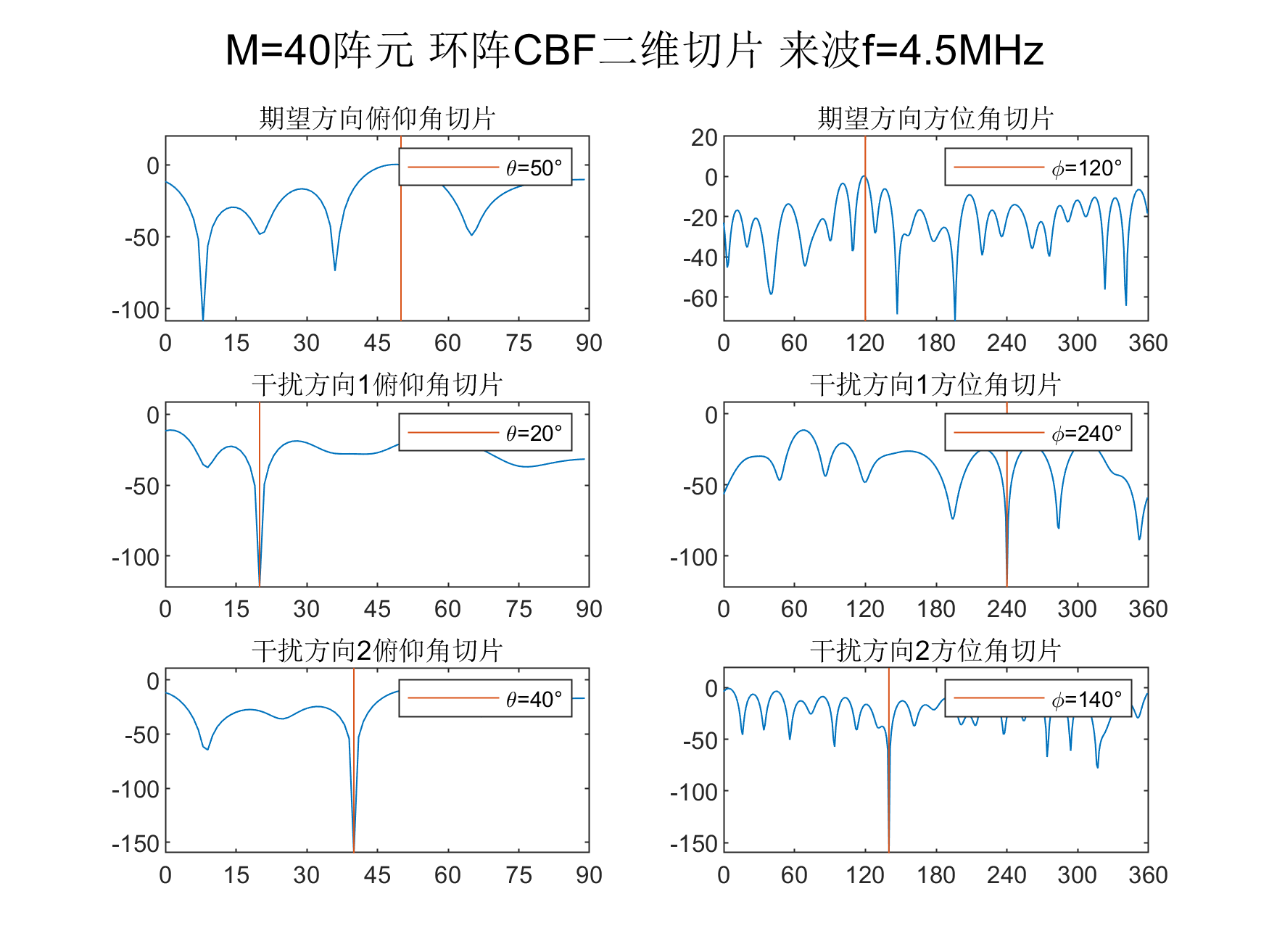
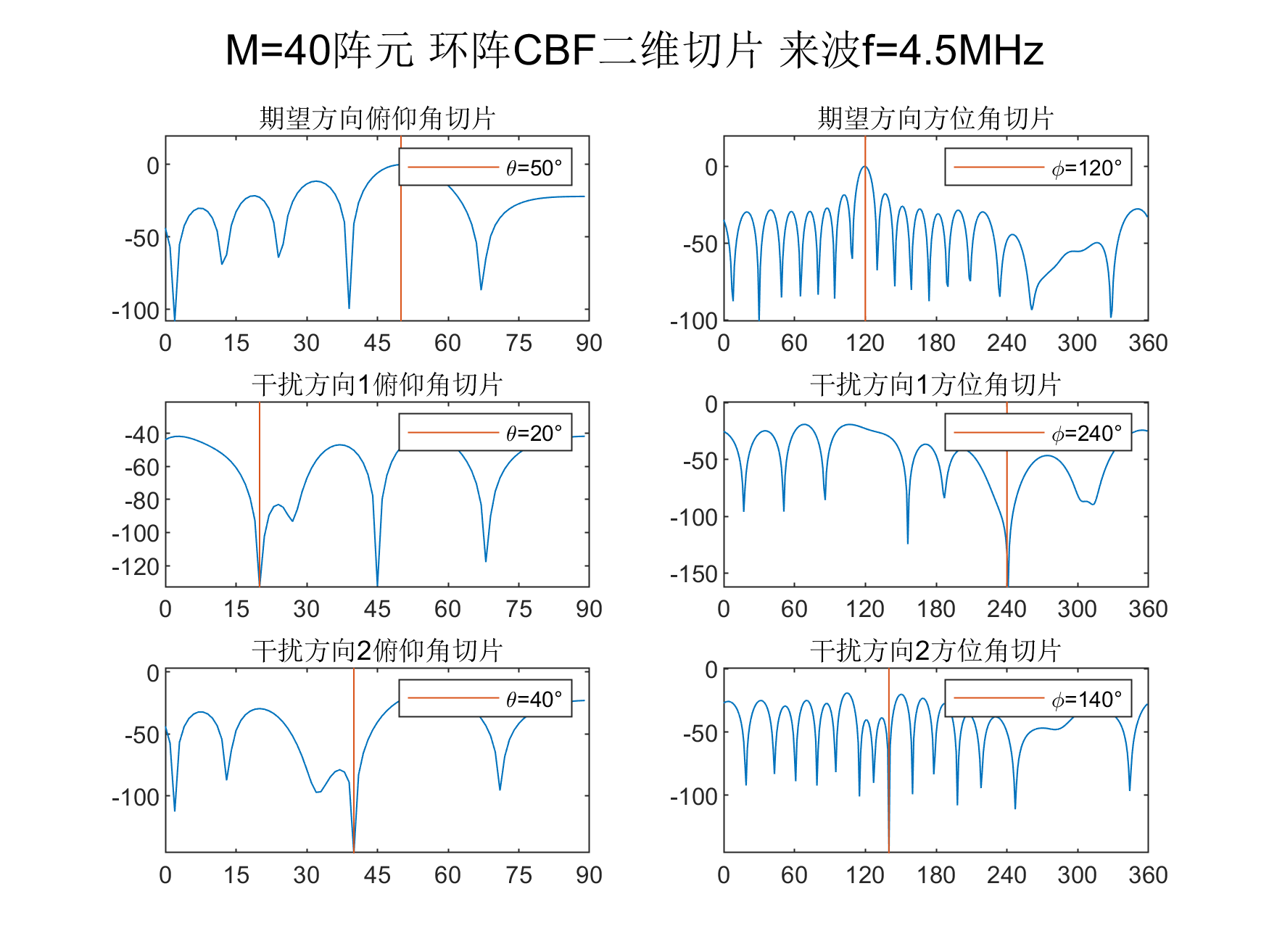
figure(2)
subplot(3,2,1)
plot(theta_scan*180/pi,F_abs(:, phi_scan==phiK(expect_n)), 'HandleVisibility', 'off')
hold on;
plot([thetaK(expect_n)/pi*180, thetaK(expect_n)/pi*180], [min(F_abs(:,phi_scan==phiK(expect_n))),40])
hold off;
title('期望方向俯仰角切片')
axis([0 90 min(F_abs(:,phi_scan==phiK(expect_n))) max(F_abs(:,phi_scan==phiK(expect_n)))+20])
set(gca,'XTick',0:15:90);
legend(['\theta=',num2str(thetaK(expect_n)/pi*180),'°']);
subplot(3,2,2)
plot(phi_scan*180/pi,F_abs(theta_scan==thetaK(expect_n), :), 'HandleVisibility', 'off')
hold on;
plot([phiK(expect_n)/pi*180, phiK(expect_n)/pi*180], [min(F_abs(theta_scan==thetaK(expect_n), :)),40])
hold off;
title('期望方向方位角切片')
axis([0 360 min(F_abs(theta_scan==thetaK(expect_n), :)) max(F_abs(theta_scan==thetaK(expect_n), :))+20])
set(gca,'XTick',0:60:360);
legend(['\phi=',num2str(phiK(expect_n)/pi*180),'°']);
subplot(3,2,3)
plot(theta_scan*180/pi,F_abs(:,phi_scan==phiK(noise_n)), 'HandleVisibility', 'off')
hold on;
plot([thetaK(noise_n)/pi*180, thetaK(noise_n)/pi*180], [min(F_abs(:,phi_scan==phiK(noise_n))),40])
hold off;
title('干扰方向1俯仰角切片')
axis([0 90 min(F_abs(:,phi_scan==phiK(noise_n))) max(F_abs(:,phi_scan==phiK(noise_n)))+20])
set(gca,'XTick',0:15:90);
legend(['\theta=',num2str(thetaK(noise_n)/pi*180),'°']);
subplot(3,2,4)
plot(phi_scan*180/pi,F_abs(theta_scan==thetaK(noise_n), :), 'HandleVisibility', 'off')
hold on;
plot([phiK(noise_n)/pi*180, phiK(noise_n)/pi*180], [min(F_abs(theta_scan==thetaK(noise_n), :)),40])
hold off;
title('干扰方向1方位角切片')
axis([0 360 min(F_abs(theta_scan==thetaK(noise_n), :)) max(F_abs(theta_scan==thetaK(noise_n), :))+20])
set(gca,'XTick',0:60:360);
legend(['\phi=',num2str(phiK(noise_n)/pi*180),'°']);
subplot(3,2,5)
plot(theta_scan*180/pi,F_abs(:,phi_scan==phiK(noise_nn)), 'HandleVisibility', 'off')
hold on;
plot([thetaK(noise_nn)/pi*180, thetaK(noise_nn)/pi*180], [min(F_abs(:,phi_scan==phiK(noise_nn))),40])
hold off;
title('干扰方向2俯仰角切片')
axis([0 90 min(F_abs(:,phi_scan==phiK(noise_nn))) max(F_abs(:,phi_scan==phiK(noise_nn)))+20])
set(gca,'XTick',0:15:90);
legend(['\theta=',num2str(thetaK(noise_nn)/pi*180),'°']);
subplot(3,2,6)
plot(phi_scan*180/pi,F_abs(theta_scan==thetaK(noise_nn), :), 'HandleVisibility', 'off')
hold on;
plot([phiK(noise_nn)/pi*180, phiK(noise_nn)/pi*180], [min(F_abs(theta_scan==thetaK(noise_nn), :)),40])
hold off;
title('干扰方向2方位角切片')
axis([0 360 min(F_abs(theta_scan==thetaK(noise_nn), :)) max(F_abs(theta_scan==thetaK(noise_nn), :))+20])
set(gca,'XTick',0:60:360);
legend(['\phi=',num2str(phiK(noise_nn)/pi*180),'°']);
suptitle(['M=',num2str(M),'阵元 环阵CBF二维切片 来波f=', num2str(f(1)/1e6),'MHz'])
|