IRS + tracking MAP/CS/User Association Strategy/Deep Learning
Mobile User Trajectory Tracking for IRS Enabled Wireless Networks
Mobile User Trajectory Tracking for IRS Enabled Wireless Networks. Deyou Zhang et.al. IEEE Transactions on Vehicular Technology, August 2021 (pdf) (Citations 3)
Mobile User移动使用的是Markov random walk
Rician channel:说的是假设Rician,实际上是LoS,但是加了一组Rician的实验。
依然假设IRS和AP位置固定,所以这段信道认为长时间不变的
用pilot symbols 估计Mobile User位置
构建MAP(最大后验概率),然后找到上界,最小化上界。使用了两种方式:
- Codebook
- MO: manifold optimization
Codebook-Based Training Beam Sequence Design for Millimeter-Wave Tracking Systems
Codebook-Based Training Beam Sequence Design for Millimeter-Wave Tracking Systems. Deyou Zhang et.al.

两均匀线阵

\(\mathbf{A}_{UE}\)的每一列,代表了在\(\theta_i,i\in N_{UE}\)下的向量,同理\(\mathbf{A}_{BS}\)中的每一列代表了在\(\theta_j,j\in N_{BS}\)下的向量。等于在做Codebook的时候,将角度分割为\(N_{UE}\)和\(N_{BS}\)份。
因为发射端假设有\(K\)个径,接收端只有1个径,所以:

写成压缩感知的形式:

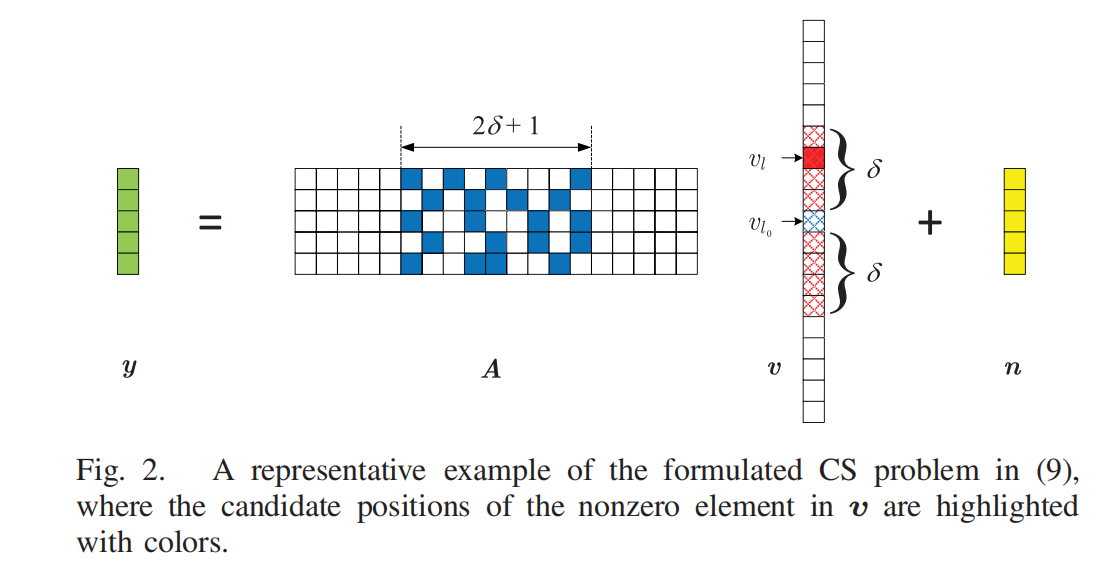
重点来了,作者说用OMP等方式求解,效率不高。
但是我认为可以丢掉\(\mathbf{A}\)很多全0的列,然后再进OMP。因为\(\delta\)是自己设置的,所以可以知道什么地方的为0。
剩下的一堆分析构造MAP,并最小化错误概率。都可省略。
Mobility-Aware User Association Strategy for IRS-Aided mm-Wave Multibeam Transmission Towards 6G
Mobility-Aware User Association Strategy for IRS-Aided mm-Wave Multibeam Transmission Towards 6G. Hiroaki Hashida et.al. IEEE Journal on Selected Areas in Communications, May 2022 (pdf) (Citations 8)
- 搞了个User和IRS的配对。
- 不涉及跟踪本身的算法 ,假设跟踪是完美执行的。
- 主要贡献在于合理分配IRS和用户链接,使得链接的中断概率和平均信道容量取得tradeoff(这个tradeoff是因为,当分配较多的IRS时,信道容量肯定上升,但是由于占用了较多的IRS,使得一旦有中断的情况发生,就没有中断鲁棒性)
BS、IRS、Ues进行详尽的波束扫描以确定最佳波束和User-IRS配对
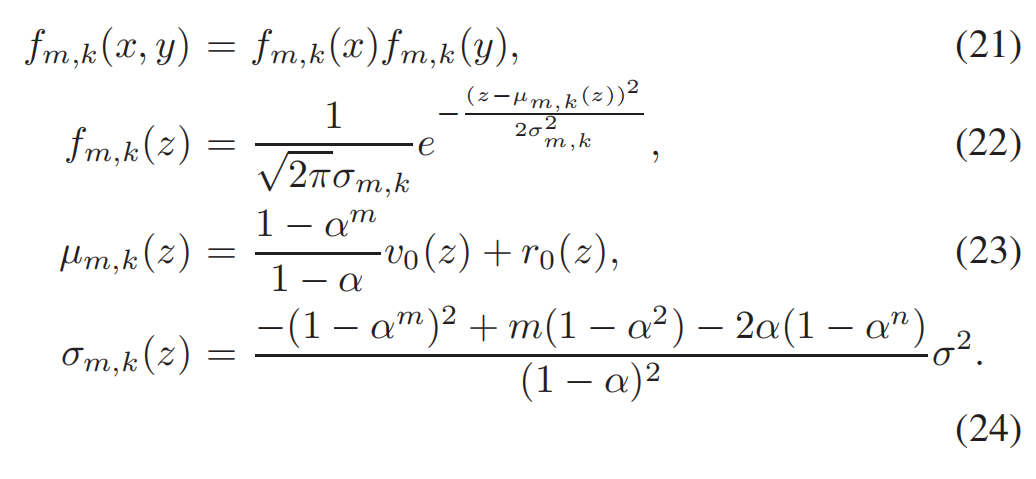
在二维平面中的位置PDF由下式给出:
Deep Learning for Channel Tracking in IRS-Assisted UAV Communication Systems
Deep Learning for Channel Tracking in IRS-Assisted UAV Communication Systems. Jiadong Yu et.al. IEEE Transactions on Wireless Communications, September 2022 (pdf) (Citations 7)
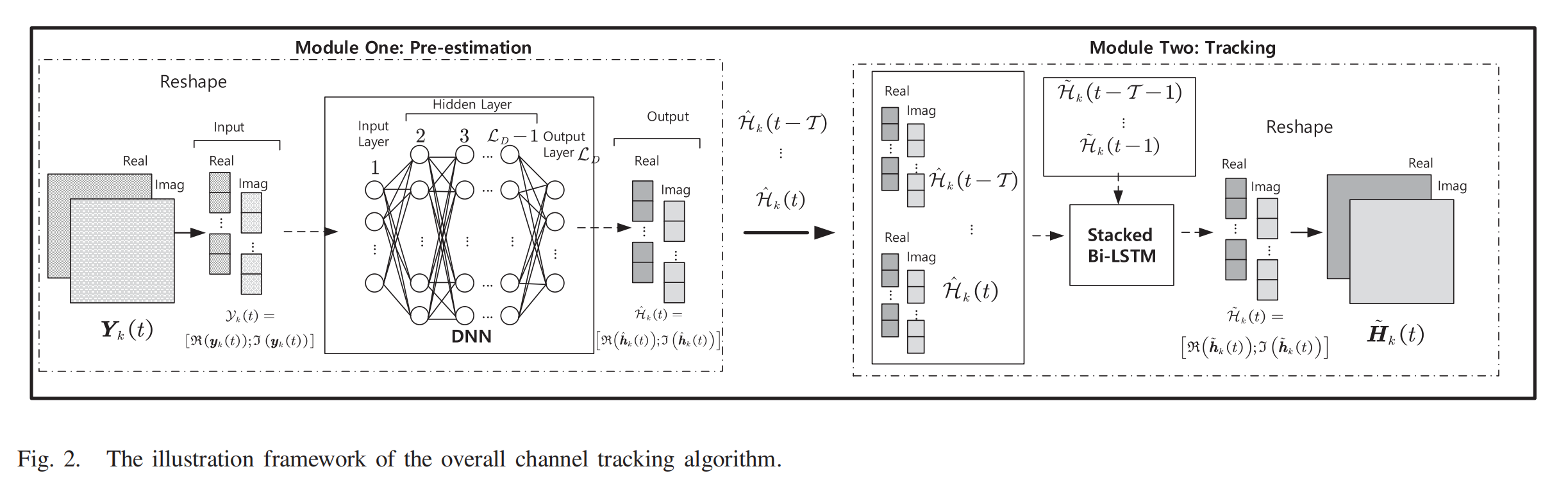
- 使用Deep Learning的方法(LSTM):先预估计信道,再跟踪信道(两个机器学习模型,分别完成上述任务)
有点扯,IRS的相位调整没考虑。