IRS + Tracking Self-Sensing scheme
Target Sensing With Intelligent Reflecting Surface: Architecture and Performance. Xiaodan Shao et.al. IEEE Journal on Selected Areas in Communications, July 2022 (pdf) (Citations 15)
Quick Overview
- 设计了一种单独发射基站,IRS(反射+接收信号和处理),目标的结构。与传统的单基站感知定位(收发两种天线or全双工形式)相比,没有干扰(干扰很小)
- 用MUSIC估计角度,最小化其MSE很难,==所以等价于最大化接收端(IRS controller)的接收平均信号功率==(有参考文献证明)
- 基于离散傅里叶变换(DFT)的IRS被动反射是最优的。(主要是进行全向波束的扫描,对我而言不应该是这样)
- 推导了CRB
其实这篇文章很简单,写的很复杂。
System Model
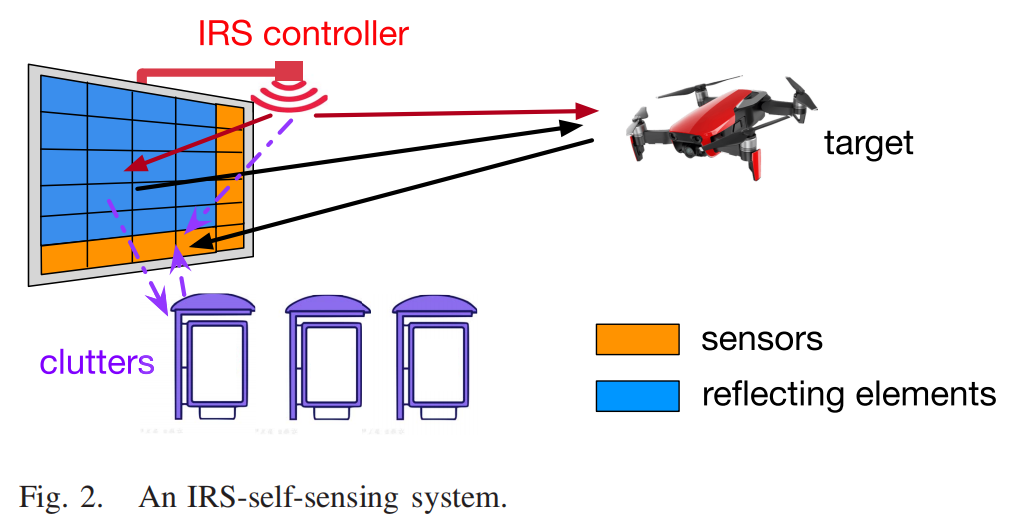
- IRS controller 单天线
- target回波也等于是只收到了一个RCS(雷达截面积)的损耗

Details
所以实际接收到的信号为: \[ \begin{aligned} & \mathbf{y}_0[t]=(\mathbf{g}_{\mathrm{r}}[t]+\mathbf{g}_{\mathrm{d}}+\underbrace{\sum_{\ell=1}^L\left(\mathbf{g}_{\mathrm{r}, I_{\ell}}[t]+\mathbf{g}_{\mathrm{d}, I_{\ell}}\right)+\mathbf{h}_{\mathrm{CS}}}_{\text {background channel }}) x[t]+\mathbf{z}_0[t], \quad t \in \mathcal{T} \end{aligned} \] 其中的background channel其实是想要去掉的。所以作者设计了offline和online。
offline阶段: \[ \mathbf{y}_{\mathrm{int}}(\boldsymbol{\varphi})=(\underbrace{\sum_{\ell=1}^L\left(\mathbf{g}_{\mathrm{r}, I_{\ell}}(\boldsymbol{\varphi})+\mathbf{g}_{\mathrm{d}, I_{\ell}}\right)+\mathbf{h}_{\mathrm{CS}}}_{\mathbf{g}_{\mathrm{int}}(\boldsymbol{\varphi}) \text { : background channel }}) x+\tilde{\mathbf{z}}, \] 假设没有target,对环境背景噪声进行估计,注意这里是有个\(\tilde{\mathbf{z}}\sim\mathcal{CN}(0,\sigma_0^2)\)。
online阶段:

这个时候由接受到的信号减去background channel,就得到了期望信号。==但是得注意,此时的噪声\(\mathbf{z}[t]\sim\mathcal{CN}(0,\sigma^2)\),此时\(\sigma^2=2\sigma^2_0\),因为两个noise的减法,方差相加==。
最后把信号写成了
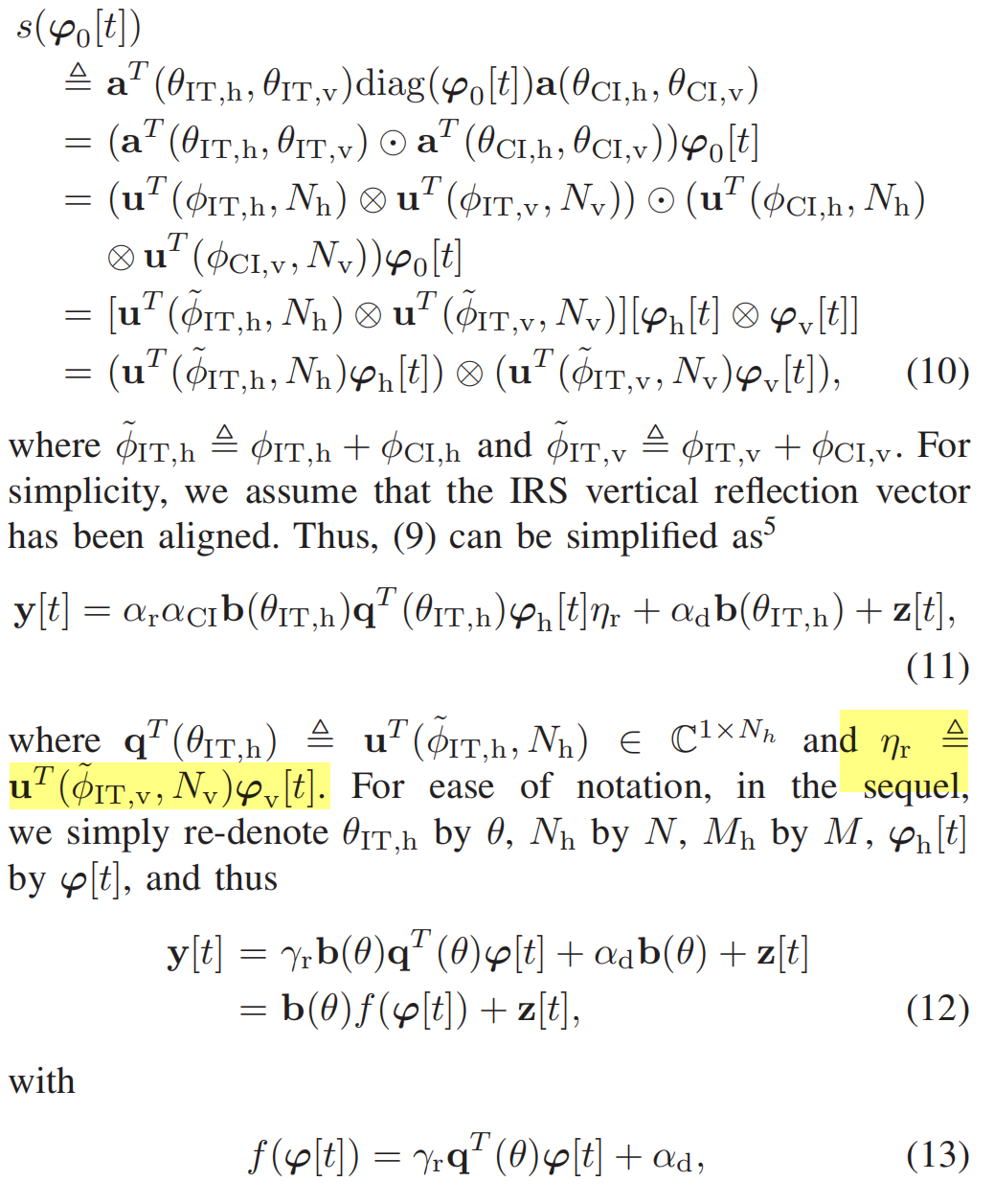
因为作者只假设了一个二维的角度估计,所以只有一个水平的角度需要估计,然后竖直方向的角度认为是固定的(常量),所以把常量写到一起,整理为(13)的形式,最后拿这个做MUSIC:

主体就结束了。
More
然后做了一个优化问题,得到最佳的IRS反射向量。(在没有任何先验信息的前提下,最大化接收功率的期望,最后得到的结果为一个全向扫描的Phase shift vector)
求解了CRB