优化基础-IRM Rank-one constrain recovery
前言
在做一些QCQP(抽空整理一下)问题的时候,存在求解: \[ \mathbf{C}=\mathbf{c}\mathbf{c}^H \] 后还要再求解\(\mathbf{c}\)的情况,其中\(\mathbf{C}\in\mathbb{C}^{N\times N}\),\(\mathbf{c}\in\mathbb{C}^{N\times 1}\)。一般都是丢掉Rank one constrain 得到结果后再恢复rank one。
恢复算法之前一直采用的是Gaussian randomization,总觉得很奇怪。最近学习到了一个算法叫做IRM,效果不错.
Gaussian Randomization
Refer to my blog
Iterative Rank Minimization
参考解析2 和文献
[1] Sun C , Liu Y C , Dai R , et al. Two Approaches for Path Planning of Unmanned Aerial Vehicles with Avoidance Zones[J]. Journal of Guidance Control & Dynamics, 2017, 40(8).
[2] Sun C , Dai R . An iterative approach to Rank Minimization Problems[C]// Decision & Control. IEEE, 2016.
[3] C. Sun, N. Kingry and R. Dai, “A Unified Formulation and Nonconvex Optimization Method for Mixed-Type Decision-Making of Robotic Systems,” in IEEE Transactions on Robotics, vol. 37, no. 3, pp. 831-846, June 2021, doi: 10.1109/TRO.2020.3036619.
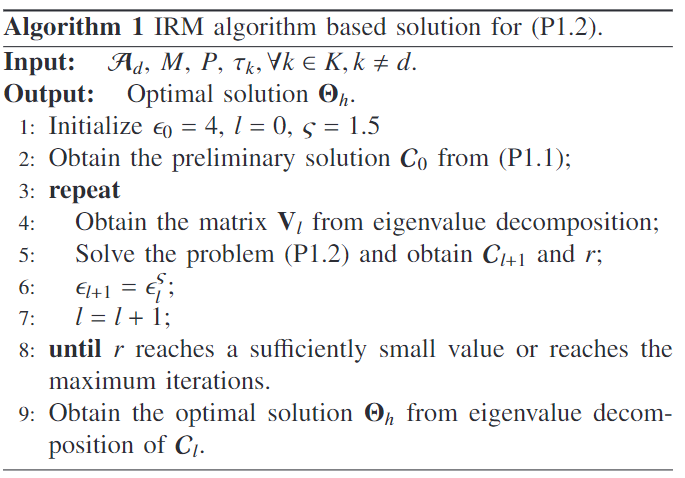
对应于我最近的工作,想要解决问题: \[ \begin{align} \text{(P1): }\max_{\mathbf{v},\boldsymbol{\Theta}} \,\,&\text{trace}(\boldsymbol{\mathcal{C}}\boldsymbol{\mathcal{A}}_d)\label{eqn:eqnP1}\\ \text{s.t.}\,\,\,\,&\text{diag}(\boldsymbol{\mathcal{C}})=\left|\mathbf{v}^T\boldsymbol{\beta}(\varpi_{G})\right|^2\mathbf{1}_N,\tag{\ref{eqn:eqnP1}a}\label{eqn:eqnP1consA}\\ &\text{trace}(\boldsymbol{\mathcal{C}})\leq MNP,\tag{\ref{eqn:eqnP1}b}\label{eqn:eqnP1consB}\\ &\text{trace}(\boldsymbol{\mathcal{C}}\boldsymbol{\mathcal{A}}_k)=0,\forall k\in K, k\neq d,\tag{\ref{eqn:eqnP1}c}\label{eqn:eqnP1consC}\\ &\boldsymbol{\mathcal{C}} = \mathbf{c}^\dagger\mathbf{c}^T,\tag{\ref{eqn:eqnP1}d}\label{eqn:eqnP1consD}\\ &\mathbf{c}^T=\mathbf{v}^T\boldsymbol{\beta}(\varpi_{G})\boldsymbol{\alpha}^T(\vartheta_G,\varphi_G)\boldsymbol{\Theta}\tag{\ref{eqn:eqnP1}e}\label{eqn:eqnP1consE},\\ &\text{Rank}(\boldsymbol{\mathcal{C}}) = 1,\tag{\ref{eqn:eqnP1}f}\label{eqn:eqnP1consF} \end{align} \] 现丢掉Rank one constrain,得到: \[ \begin{align} \text{(P1.1): }\max_{\boldsymbol{\Theta}_h} \,\,\,&\text{trace}(\boldsymbol{\mathcal{C}}\boldsymbol{\mathcal{A}}_d)\label{eqn:eqnP1p1}\\ \text{s.t.}\,\,\,\,\,&\text{diag}(\boldsymbol{\mathcal{C}})=MP\mathbf{1}_N,\tag{\ref{eqn:eqnP1p1}a}\label{eqn:eqnP1p1consA}\\ &\mathbf{c}^T=\sqrt{MP}\mathbf{1}_N^T\boldsymbol{\Theta}_h,\tag{\ref{eqn:eqnP1p1}b}\label{eqn:eqnP1p1consB}\\ &\text{trace}(\boldsymbol{\mathcal{C}}\boldsymbol{\mathcal{A}}_k)\leq \tau_k,\forall k\in K,k\neq d,\tag{\ref{eqn:eqnP1p1}c}\label{eqn:eqnP1p1consC}\\ &\eqref{eqn:eqnP1consB}, \eqref{eqn:eqnP1consD}, \tag{\ref{eqn:eqnP1p1}d}\label{eqn:eqnP1p1consD} \end{align} \] 再进行IRM恢复: \[ \begin{align} \text{(P1.2): }\min_{\boldsymbol{\Theta}_{h,l}, r} \,\,\,&-\text{trace}(\boldsymbol{\mathcal{C}}_l\boldsymbol{\mathcal{A}}_d)+\epsilon_l r\label{eqn:eqnP1p2}\\ \text{s.t.}\,\,\,\,\,&\text{diag}(\boldsymbol{\mathcal{C}}_l)=MP\mathbf{1}_N,\tag{\ref{eqn:eqnP1p2}a}\label{eqn:eqnP1p2consA}\\ &\mathbf{c}^T_l=\sqrt{MP}\mathbf{1}_N^T\boldsymbol{\Theta}_{h,l},\tag{\ref{eqn:eqnP1p2}b}\label{eqn:eqnP1p2consB}\\ &\text{trace}(\boldsymbol{\mathcal{C}}_l\boldsymbol{\mathcal{A}}_k)\leq \tau_k,\forall k\in K,k\neq d,\tag{\ref{eqn:eqnP1p2}c}\label{eqn:eqnP1p2consC}\\ &r\mathbf{I}_{N-1}-\mathbf{V}_l^H\boldsymbol{\mathcal{C}}_l\mathbf{V}_l \succeq \mathbf{0},\tag{\ref{eqn:eqnP1p2}d}\label{eqn:eqnP1p2consD}\\ &\eqref{eqn:eqnP1consB}, \eqref{eqn:eqnP1consD}, \tag{\ref{eqn:eqnP1p2}e}\label{eqn:eqnP1p2consE} \end{align} \] 总的流程如下: